Elevator System (Low-Level-Design)

Problem Definition
Elevators are an essential component of many buildings, especially those with multiple floors or high-rise structures, where stairs may not be a practical option. The objective of an elevator system is to provide an alternative means of vertical transportation that is convenient, accessible, and safe for all building occupants.
Requirements
There can be multiple floors
There can be more than one elevator
Elevators can be added or removed(for maintenance) as needed.
Two types of requests to be considered-
i. Person on the floor pressing the UP/DOWN button to call the elevator
ii. Person in the elevator pressing the floor number button to reach a destination
The algorithm for calling the elevator should be dynamic.
The functional algorithm for the elevator should also be dynamic
Objects
ElevatorSystem
ElevatorCar
ElevatorController
Floor
Button- InternalButton, ExternalButton
Direction- UP, DOWN, NONE
Display
Door
Dispatcher- InternalDispatcher, ExternalDispatcher
ElevatorSelectionStrategy- OddEvenStrategy, ZoneStrategy
ElevatorControlStrategy- FirstComeFirstServe, ShortestSeekTime, ScanAlgorithm, LookAlgorithm
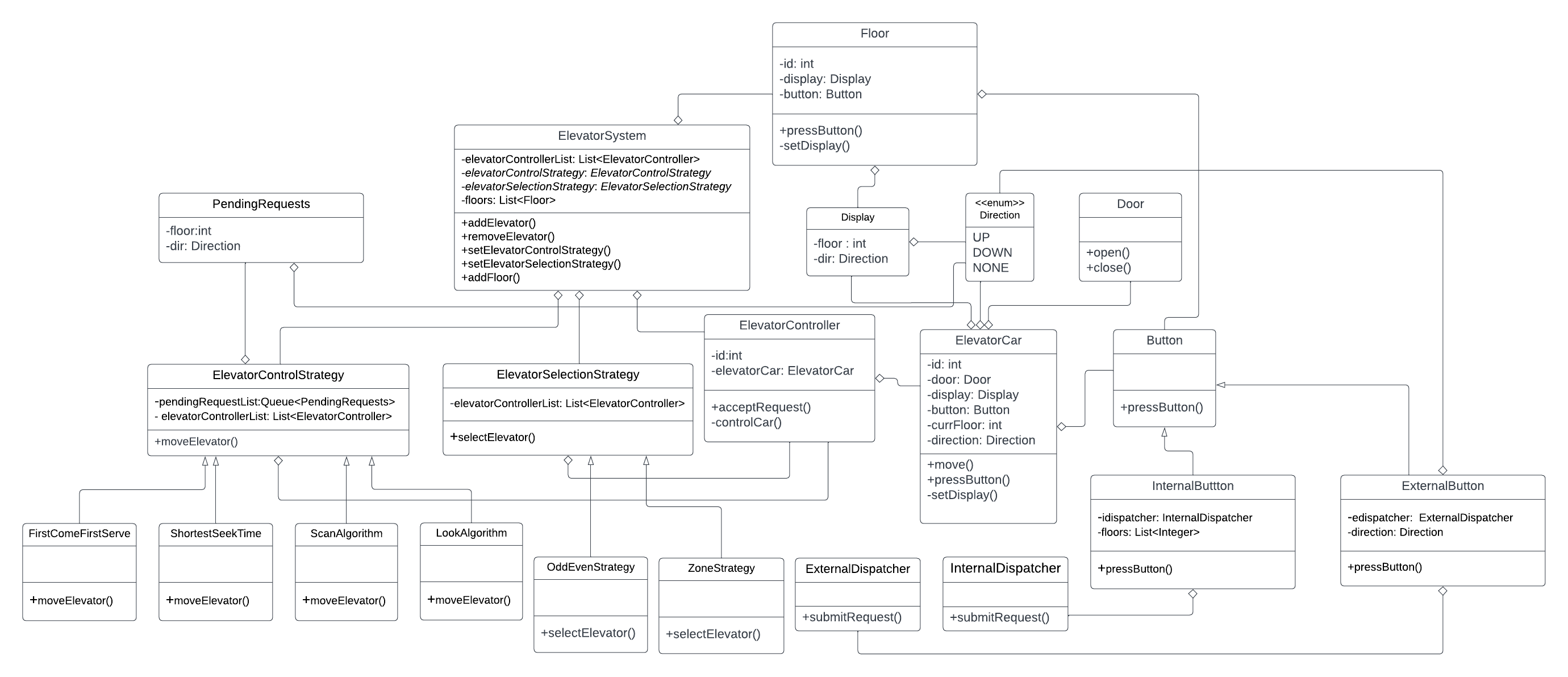
UML Class Diagram
Code
public class Button {
//for External Button
public void pressButton(int floor, Direction dir){}
//for Internal Button
public void pressButton(int floor, Direction dir, int elevatorId){}
}
public enum Direction {
UP, DOWN, NONE;
}
@Getter
@Setter
public class Display {
private int floor;
private Direction dir;
}
public class Door {
public void open(int id)
{
System.out.println("Door opens for elevator "+ id);
}
public void close(int id)
{
System.out.println("Door closes for elevator "+ id);
}
}
@Getter
public class ElevatorCar {
private int id;
private Door door;
private Display display;
private Button button;
@Setter
private int currentFloor; //updated while elevator moves to each floor
private Direction dir; //updated every time elevator hanges direction
public ElevatorCar(int id)
{
this.id= id;
door= new Door();
display= new Display();
currentFloor= 0;
dir= Direction.NONE;
button= new InternalButton();
}
public void move(Direction dir, int floor)
{
System.out.println("Elevator " + id + "moving " + dir);
System.out.println("Elevator " + id + "stops at floor " + floor);
door.open(id);
door.close(id);
//called everytime when currFloor value changes
setDisplay();
}
public void pressButton(int floor)
{
Direction dir= Direction.NONE;
if(floor>currentFloor)
dir= Direction.UP;
else if(floor<currentFloor)
dir= Direction.DOWN;
button.pressButton(floor, dir, id);
}
private void setDisplay()
{
display.setFloor(currentFloor);
display.setDir(dir);
}
}
@Getter
public class ElevatorController {
private int id;
private ElevatorCar elevatorCar;
public ElevatorController(int id)
{
this.id= id;
elevatorCar= new ElevatorCar(id);
}
public void acceptRequest(int floor, Direction dir)
{
ElevatorSystem.elevatorControlStrategy.getPendingRequestList().add(new PendingRequests(floor, dir));
controlCar();
}
private void controlCar()
{
ElevatorSystem.elevatorControlStrategy.moveElevator(this);
System.out.println("Elevator moving...");
}
}
@Getter
public class ElevatorSystem {
private List<ElevatorController> elevatorControllerList= new ArrayList<ElevatorController>();
public static ElevatorControlStrategy elevatorControlStrategy;
public static ElevatorSelectionStrategy elevatorSelectionStrategy;
public List<Floor> floors= new ArrayList<Floor>();
public static ElevatorSystem INSTANCE= new ElevatorSystem();
private ElevatorSystem()
{
}
public void addElevator(ElevatorController e)
{
elevatorControllerList.add(e);
}
public void removeElevator(ElevatorController e)
{
elevatorControllerList.remove(e);
}
public void setElevatorControlStrategy(ElevatorControlStrategy elevatorControlStrategy)
{
this.elevatorControlStrategy= elevatorControlStrategy;
}
public void setElevatorSelectionStrategy(ElevatorSelectionStrategy elevatorSelectionStrategy)
{
this.elevatorSelectionStrategy= elevatorSelectionStrategy;
}
public void addFloor(Floor floor)
{
floors.add(floor);
}
}
public class ExternalButton extends Button{
private ExternalDispatcher edispatcher= ExternalDispatcher.INSTANCE;
@Getter
private Direction direction;
public void pressButton(int floor, Direction dir)
{
direction= dir;
System.out.println("Pressed " + direction + " from floor " + floor);
edispatcher.submitRequest(floor, dir);
}
}
public class InternalButton extends Button{
private InternalDispatcher idispatcher;
@Getter
private List<Integer> floors= new ArrayList<Integer>();
public InternalButton()
{
idispatcher = new InternalDispatcher();
}
public void pressButton(int floor, Direction dir, int elevatorId)
{
floors.add(floor);
System.out.println("Pressed floor "+ floor + " from elevator "+ elevatorId);
idispatcher.submitRequest(floor, dir, elevatorId);
}
}
@Getter
@Setter
public class Floor {
private int id;
private Display display;
private Button button;
public Floor(int id)
{
this.id= id;
button= new ExternalButton();
}
public void pressButton(Direction dir)
{
button.pressButton(id, dir);
}
//called everytime selected elevator moves each floor
private void setDisplay(int floor, Direction dir)
{
display.setDir(dir);
display.setFloor(floor);
}
}
public class InternalDispatcher {
public void submitRequest(int floor, Direction dir, int elevatorId)
{
for(ElevatorController eController: ElevatorSystem.INSTANCE.getElevatorControllerList())
{
if(eController.getId()== elevatorId)
{
eController.acceptRequest(floor, dir);
}
}
}
}
public class ExternalDispatcher {
public static ExternalDispatcher INSTANCE = new ExternalDispatcher();
private ExternalDispatcher()
{
}
public void submitRequest(int floor, Direction dir)
{
int elevatorId= ElevatorSystem.elevatorSelectionStrategy.selectElevator(floor, dir);
System.out.println("Selected elevator " + elevatorId);
for(ElevatorController eController: ElevatorSystem.INSTANCE.getElevatorControllerList())
{
if(eController.getId()== elevatorId)
{
eController.acceptRequest(floor, dir);
}
}
}
}
public class ElevatorSelectionStrategy {
protected List<ElevatorController> elevatorControllerList = ElevatorSystem.INSTANCE.getElevatorControllerList();
public int selectElevator(int floor, Direction dir) {
return 0;
}
}
public class OddEvenStrategy extends ElevatorSelectionStrategy {
@Override
public int selectElevator(int floor, Direction dir) {
for(ElevatorController eController: elevatorControllerList)
{
//old elevator for odd floors and even elevators for even floors
//select elevator which is moving in same direction which is requested or IDLE elevator
// if(floor%2 == eController.getId()%2)
// {
// int currFloor= eController.getElevatorCar().getCurrentFloor();
// Direction currDir= eController.getElevatorCar().getDir();
// if(floor>currFloor && currDir==Direction.UP)
// return eController.getId();
// else if(floor<currFloor && currDir==Direction.DOWN)
// return eController.getId();
// else if(currDir==Direction.NONE)
// return eController.getId();
//
// }
}
return ThreadLocalRandom.current().nextInt(1, elevatorControllerList.size());
}
}
public class ZoneStrategy extends ElevatorSelectionStrategy {
@Override
public int selectElevator(int floor, Direction dir) {
for(ElevatorController eController: elevatorControllerList)
{
//assign elevators according to zones in building
//out of these elevators select the elevator which is going in the same direction or is idle
}
return ThreadLocalRandom.current().nextInt(1, elevatorControllerList.size());
}
}
@Getter
public class PendingRequests {
private int floor;
private Direction dir;
public PendingRequests(int floor, Direction dir)
{
this.floor= floor;
this.dir= dir;
}
}
@Getter
public class ElevatorControlStrategy {
//queue storing pending requests in form of
@Setter private Queue<PendingRequests> pendingRequestList= new LinkedList<PendingRequests>();
private List<ElevatorController> elevatorControllerList = ElevatorSystem.INSTANCE.getElevatorControllerList();
public void moveElevator(ElevatorController elevatorController)
{
}
}
public class FirstComeFirstServe extends ElevatorControlStrategy {
public void moveElevator(ElevatorController elevatorController)
{
//poll each requests out of queue one by one
//move elevator according to each request
//Disadvantage: frequent change of direction of elevator, hence inefficient and
// long waiting time for users
}
}
public class ShortestSeekTime extends ElevatorControlStrategy {
public void moveElevator(ElevatorController elevatorController)
{
//implemented using min heap which is sorted according to
//min distance of requested floor from the current floor of elevator
//this min heap is updated everytime a new request is added in the queue or
// when elevator moves to another floor
//Disadvantage: starvation of distant floor when maximum request keeps comes from nearly floors
}
}
public class ScanAlgorithm extends ElevatorControlStrategy {
public void moveElevator(ElevatorController elevatorController)
{
// In this algorithm, elevator starts from one end of the disk and moves
// towards the other end, servicing requests in between one by one and reach the other end.
// Then the direction of the elevator is reversed and the process continues.
// Implemented using two array
// All floors with UP requests are marked in the UP array
// and all floors with DOWN request are marked in the DOWN array
// and the elevator scans UP array while moving up and DOWN array while moving down
// and it stops at the requested floors
// Advantage:
// 1. not frequent change of floor for every request
// 2. no starvation
// Disadvantage: If there are 100 floors, and last requested floor in current direction
// is 15, then also the elevator will move till the 100th floor.
// This is improved by LOOK Algorithm
}
}
public class LookAlgorithm extends ElevatorControlStrategy {
public void moveElevator(ElevatorController elevatorController)
{
// In this algorithm, the elevator moves in a specific direction,
// but instead of going all the way to the end of the building before reversing direction
// like the SCAN algorithm, it reverses direction as soon as it reaches the last
// request in the current direction.
// Implemented using a min heap, a max heap and a queue
// Min heap: all requests that can be served in UP direction
// (eg. Requested floor> currFloor, requested UP, elevator moving UP)
// Max heap: all requests that can be served in DOWN direction (floor < currFloor)
// (eg. Requested floor< currFloor, requested DOWN, elevator moving DOWN)
// Queue: all requests that cannot be served in current direction
// eg. elevator moving up and currFloor is 3, now someone at floor 1 requests up
// While moving up, all requests from min heap will be taken one by one
// when min heap is empty, elevator reverses direction and all UP requests from queue
// will be put in min heap.
// While moving down, all requests from max heap will be taken one by one
// when max heap is empty, elevator reverses direction and all DOWN requests from queue
// will be put in max heap.
// Advantage:
// 1. not frequent change of floor for every request
// 2. no starvation of requests
// 3. efficient in terms of usage because it moves only the areas of the requested floors.
// Disadvantage: it does not prioritize requests based on their urgency or importance.
}
}
In this blog, we have explored the importance of Elevator System Low-Level Design and discussed some of the key requirements that need to be considered in the design process. By addressing the technical aspects of the elevator system, the low-level design helps to ensure that the system operates smoothly, is user-friendly, and meets the needs of the building's occupants.


